Q.1.
Consider a simple mass spring friction system as given in the figure KK2 are spring constants f-friction, M-Mass, F-Force, x-Displacement. The transfer function X(s)/F(s) of the given system will be :
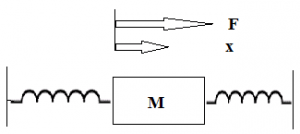
- a) 1/(Ms2+fs+K1.K2)
- b) 1/(Ms2+fs+K1+K2)
- c) 1/(Ms2+fs+K1.K2/K1+K2)
- d) K2/(Ms2+fs+K1)
Q.2.
The output of an first order hold between two consecutive sampling instants is:
- a) Constant
- b) Quadratic Function
- c) Ramp Function
- d) Exponential Function
Q.3.
Which of the following is an example of an open loop system?
- a) Household Refrigerator
- b) Respiratory system of an animal
- c) Stabilization of air pressure entering into the mask
- d) Execution of program by computer
Q.4.
A tachometer is added to servomechanism because:
- a) It is easily adjustable
- b) It can adjust damping
- c) It reduces steady state error
- d) It converts velocity of the shaft to a proportional Dc voltage
Q.5.
A synchro Transmitter is used with control transformer for:
- a) Feedback
- b) Amplification
- c) Error detection
- d) Remote sensing
Q.6.
The below figure represents:
- a) Lead network
- b) Lag network
- c) PI controller
- d) PD controller
Q.7.
Backlash in a stable control system may cause:
- a) Under damping
- b) Over damping
- c) High level oscillations
- d) Low level oscillations
Q.8.
Tachometer feedback in a D.C. position control system enhances stability?
- a) True
- b) False
Q.9.
For a tachometer, if a(t) is the rotor displacement, e(t) is the output voltage and K is the tachometer constant, then the transfer function is given by:
- a) Ks2
- b) K/s
- c) Ks
- d) K
Q.10.
Gear train in the motor is used to reduce the gear ratio?
- a) True
- b) False
Q.11.
Assertion (A): Servomotors have heavier rotors and lower R/X ratio as compared to ordinary motors of similar ratings.
- a) Both A and R are true and R is the correct explanation of A
- b) Both A and R are true but R is not correct explanation of A
- c) A is true but R is false
- d) A is false but R is true
Q.12.
Assertion (A): DC servomotors are more commonly used in armature controlled mode than field controlled mode.
- a) Both A and R are true and R is the correct explanation of A
- b) Both A and R are true but R is not correct explanation of A
- c) A is true but R is false
- d) A is false but R is true
Q.13.
In case of DC servomotor, the back emf is equivalent to an “electric friction” which tends to:
- a) Slowly decrease the stability of the system
- b) Improve stability of the system
- c) Very rapidly decrease the stability of the system
- d) Have no effect of stability
Q.14.
The lagrangian is defined as:
- a) Sum of kinetic energy and hydraulic energy
- b) Mechanical energy
- c) Difference of kinetic and potential energy
- d) None of these
Q.15.
A gantry robot consists of a manipulator mounted on an overhead system that allows movement only in ________ plane.
- a) Horizontal
- b) Inclined
- c) Vertical
- d) None of the mentioned
Q.16.
An object stationary or moving in a uniform motion w.r.t A will appear to be traveling in a straight path w.r.t B. This apparent path is attributed to Coriolis acceleration.
- a) True
- b) False